ナローマルチビーム
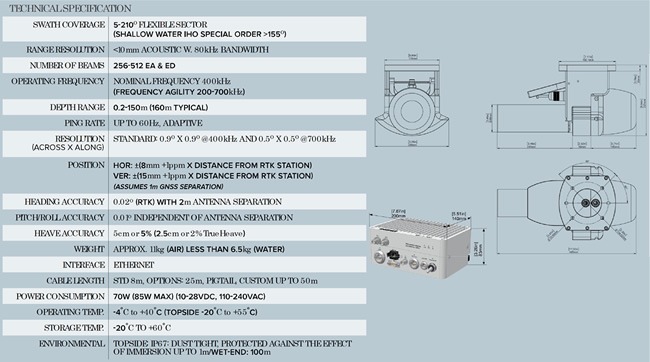
NORBIT社製マルチビームソナーシステム{iWBMSh}は、ソナー部(送受信波器)と動揺センサー(IMU)、表層水中音速(SV)が一体となったマルチビーム音響測深器です。
水中部からくる1本のケーブルに、ソナーデータ・動揺データ・音速度データが上がってくるため面倒な配線が不要です。
動揺センサー(IMU)が送受波器と一体になっている為パッチテストが不要です。
受信部はフラットアレー方式ではなく、カーブドアレー(Curved Array)方式を採用しており、7~210°の間で任意のスワス幅を変更可能です。
周波数は200~700kHzの間で任意に選択可能です。動揺センサー(IMU)は、Applanix社製OceanMasterを搭載しており、高精度な軌跡管理が可能です。
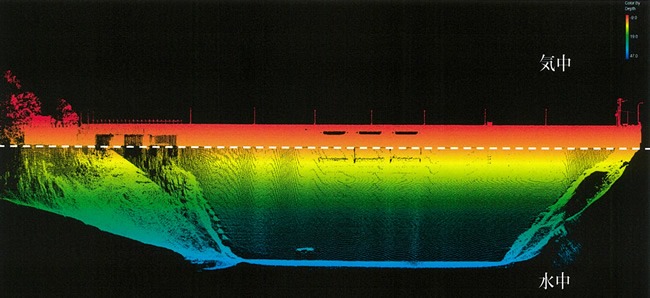
水面下と地上部を同時に三次元計測
ナローマルチビーム測深機は、海底(湖底)地形を面的に捉えることができ、近年の港湾やダムの測量では利用が激増しています。
当社のレーザ移動体計測ノウハウを活かし、現行のナローマルチビーム測深機における計測課題を解決し、
効率的且つ高精度な三次元計測サービスを提供します。
従来技術では、地上部と水面下を別のシステムで計測していました。
当社システムでは、港湾やダムなどにおいて地上地形との連動が必要となる箇所の計測が一度で可能となります。
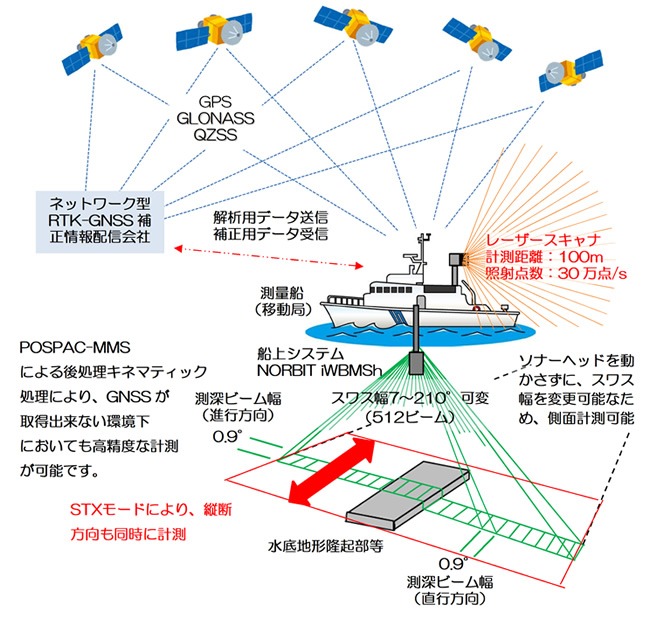
また、POSPac-MMSによる後処理解析を行うことで、GNSS受信環境に左右されない高精度なデータが提供可能です。
業界最高性能IMU「POS MV OCEANMASTER」を搭載し、船舶軌跡からレーザスキャナーの高精度点群作成を可能としました。
計測距離100m(計測精度2cm)のスキャナーにより、船舶から約50m範囲の地上三次元点群化が可能です。(計測精度20cm 調整点有)
ナローマルチビーム測深システムの特徴
① ソナー部とIMUと音速時計を一体型にすることで、部品数やケーブル等が従来機と比べ少ないため、小型・軽量である。
② カーブドアレー方式採用により、ソナーヘッドを動かさずに側面方向を計測出来る。
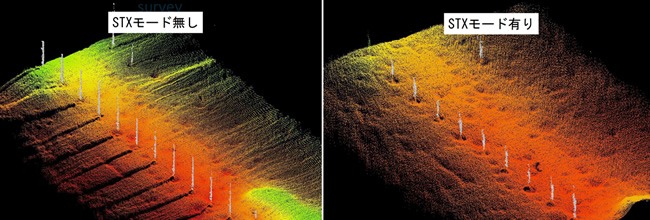
③ 最新技術であるSTXモードを搭載しており、ソナーの影部分の影響が少ない。
④ レーザスキャナーを搭載しており地上部と水面下の三次元化を平行作業で実施出来る。
⑤ サイドスキャンソナー機能により、反射強度による海底状況を表現出来る。

サイドスキャンソナーは、送受波器から扇状に音波を発振し、その反射波の強度を色の濃淡として描画する技術です。
反射強度は海底の性状の違いを示しており、海底面の堆積物(泥・砂・礫)の相対的な区分が可能です。
ダムなどの湖底部状況をより詳細に判別することが可能です。
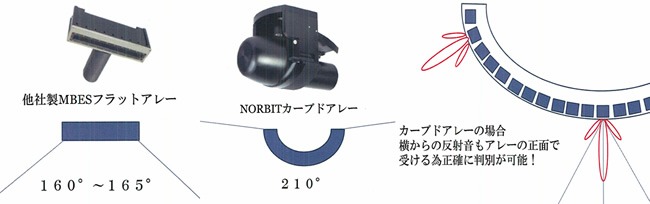
カーブドアレー方式
フラットアレー方式では、水平方向計測時にソナーヘッドを傾ける調整作業が必要でした。
カーブドアレー方式では、ソナーヘッドを固定したまま水平方向の計測が可能であること、
反射波を正面で受けられることにより、高精度かつ効率的な計測が可能となりました。
NORBIT社製 iWBMSh STX Mode
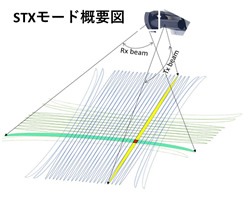
従来機では、音波の照射が、軌跡に対して、横断方向への計測が主体のため、横断方向に地物がある場合、影が発生する。
STXモードでは音波を横断方向と横断方向に同時照射することで、横断方向の影部分の影響が少なく、詳細な地形計測が可能である。